
本文来自微信公众号:宇多田(ID:hellomusk),作者:宇多田,题图来自:《末路狂花》
人工智能产业(包括自动驾驶)有一个不可忽视的人性缺陷:
除了天然受制于技术语言,也有不少人故意把东西说得模棱两可、艰涩难懂、天下第一……以达到让人不明觉厉、让资本掏钱的目的。
有些自动驾驶公司就善于此道。
或者说,如今市面上,把汽车工业与“超大模型”“GPT”以及“AIGC”强绑定的说辞,基本可以归于“非蠢即坏”的商业炒作行径。
特别是,在“大模型”到底有多大都没法定义的情况下,有人拿出几亿参数值说大,有人搬出几十亿也说大,而GPT2的“大”就有150亿,GPT3则是1750亿。
当然,大不大无所谓,很多人关心的问题是,开始有公司向汽车产业推出所谓的自动驾驶GPT,到底有什么用?
答案是,或许真的没太多用处。
首先,就像写Paper占坑一样,它的确有一小部分研究价值,属于学术界的任务;
其次,忽悠资本,因为不少资本会对汽车产业与大模型的双倍规模与估值买账。
但事实上,包括自动驾驶产业与深度学习圈,许多开发者们对“自动驾驶GPT”的说法很不认同,甚至是极为恼火的。
我们请教了多位曾在大厂、中美科技独角兽做自动驾驶研发的资深工程师,以及包括OEM在内的汽车产业人士看法,再结合部分博客文章,总结了一些观点,或许会对汽车工业、资本以及更广阔的大众*体有一些启发。
把GPT吹上车
以某家公司给出的“自动驾驶GPT产品”为例,其神经网络概念图让内行都一头雾水,不知所云。
此外,1200亿的参数量的确够大,相当于对标了GPT3。这意味着支撑这庞大数据量训练的硬件资源支持,同样不菲。
但是,他们虽背靠主机厂,却并没有自建昂贵的数据中心,而是跟其他企业一样租用云上资源。很明显,这是将某大厂云服务整合包装为自己的数据基础设施服务*。
其次,重要的,大模型到底怎么落地?
把跟ChatGPT一样的“黑匣子”塞进汽车里,做从“感知、规划到决策”(这是自动驾驶技术三个组成部分)的端到端输出?
从这一方向,各方非常严谨地表示,目前离落地非常遥远。
ChatGPT有着自己天然的生存环境,那就是昂贵的数据中心里。而所有关于AIGC的应用都要跟数据中心联网,这没有任何问题——在光缆的连接*里,做到极快反应。
但作为大型移动设备,车唯一靠的就是无线,但目前连5G也非常不稳定。所以,包括特斯拉在内,大家都只能选择走一条路——
将高性能且轻量化的算法模型,塞进一枚性价比足够高的芯片里。
本质上,英伟达从Tegra 2、Xavier,过渡到Orin,再到2000Tops的Thor,算力的确是沿着自动驾驶AI算法模型在车内的疯狂扩充与变化而一路往上爬的。
而估算一下,GPT3需要的算力至少是Thor的10的N次方倍。
当然,就像GPT3.5开源之后,有开发者已采用量化技术用苹果M2芯片运行起ChatGPT,所以,不排除未来有人会把它塞进英伟达的芯片里。
但是,除去车辆感知、规划与决策过程本身的复杂性,汽车工业疯狂追求的性价比、以及延迟两秒就会出人命的严苛交通环境,对一切“不可解释性”有着天然的回避姿态。因此,业内认为,可行的时间点极为遥远。(当然,这家公司说自己的模型对于驾驶策略是可解释的,请拿出更详细的证据。)
目前来看,自动驾驶前装市场普遍情况是:“唯有‘感知’模块用上了模型”。
业内清楚,感知好做,且各家已成功落地——从СNN(卷积神经网络)开始,它就是一套相对成熟的流水线。而芯片里的GPU部分也基本被“感知”占用。
当然,“决策”与“规划”两个部分,并非没有人做AI化尝试,只是汽车工业大多在当下,依然采用为稳健的方法——
一系列来自机器人等领域的经典规则理论。譬如以“蒙特卡罗搜索树”为代表的启发式搜索算法。
以“规划”为例,其上车常见的方式是把“纵向规划”和“横向规划”分开,做“时空分离”。而在这一点的创新上,就分出了几个“流派”——
-
以B大厂与苏Q厂为代表,做时空联合规划。相当于把纵向控制与横向控制的问题结合在一起,更容易搜索出全局优值。
这个流派的优点是,在面对极为困难或复杂场景,局部优算法很难搜索出一个更智能路径,但全局可能性更大。但缺点是占用更多算力。
-
以苏M厂等很多从深度学习领域“出道”的公司为代表,在经典决策规划里融入AI算法,把其中一部分模块用AI算法替代掉,而非上来就做大一统。
的确,五六年前“计算机视觉”的大火,早就证明了深度学习具备巨大的应用潜力。但它的缺点也是显而易见的——“不可解释性”,以及通过大量资源投入来持续燃烧数据。
因此,要想上车,大部分企业在努力采用折中的方式——经典理论辅以AI算法,既保留经典方法的稳定性,又能提升性能表现。
“譬如,规划里的‘路径生成’,就可能用AI做替代;而路径的选择、判定以及决策,以及后面的纵向规划,仍基于规则去做,形成一种复合方法。”
因此,大模型当然是一个终极理想状态,但上车的好方法却是“分步骤推进”,与成本之间做更多权衡。
当然,如今也有高端玩家们已经在研究“单模型多任务”的所谓“大一统”形式,不过一切没有定论。
大小可能不重要
我们从来都没想到,就像当年“自动驾驶分级”概念的模糊不清,让国内不少公司钻过空子一样;大模型这个“大”竟开始也被钻空子——
你有10亿,我有100亿,他有1000亿参数。
然而,在国外,对大模型的“大小”虽然有讨论,却从来不是重点。况且,国外工业界已经有了“去大用小”的势头。因为“大模型”绝不是越大越好,越大就意味着越不透明,越具有排它性。
包括苏黎世联邦理工大学的科学家在内,一*年轻学者已发起一个叫做“BabyLM”的迷你模型挑战赛,用规模为大型语言模型千分之一(一亿参数左右)做更适用工业界的模型。
此外,20*,诸多国内自动驾驶公司蹭的所谓“Transformer”大模型,更多指代的,是包括GPT在内诸多大模型背后的深度学习基础架构,而非仅指代大模型本身。
它早出现在2017年谷歌的论文里。但这个被常用在自然语言处理(NLP)的Transformer模型,之所以突然在自动驾驶视觉界火了,是因为特斯拉将这一深度学习模型的“原理”,极具创造性地用在了“图像空间转化为矢量空间”的感知预测中。
简单来说,特斯拉工程师思考的是,既然这是一个优秀的语言翻译模型,那么为何不能将“摄像头获取的图像空间‘翻译’为3D矢量空间”?
所以,Transformer发源于NLP但转入了CV(计算机视觉);而2023年火的BEV大模型,则是基于Transformer在自动驾驶领域的衍生物。
如果感兴趣,可以直接看Medium上关于特斯拉FSD的技术博客。工程师全程从没提过所谓的BEV模型到底有多大(虽然BEV被印证的确是烧数据的),而是设法解决目前车载摄像头数据融合产生的问题——
纯摄像头系统对闭塞区域与大型物体的预测结果比较糟糕,那么便从神经网络源头改变算法模型的设计理念——从图像过渡至BEV。
效果也确实有了质的提升。
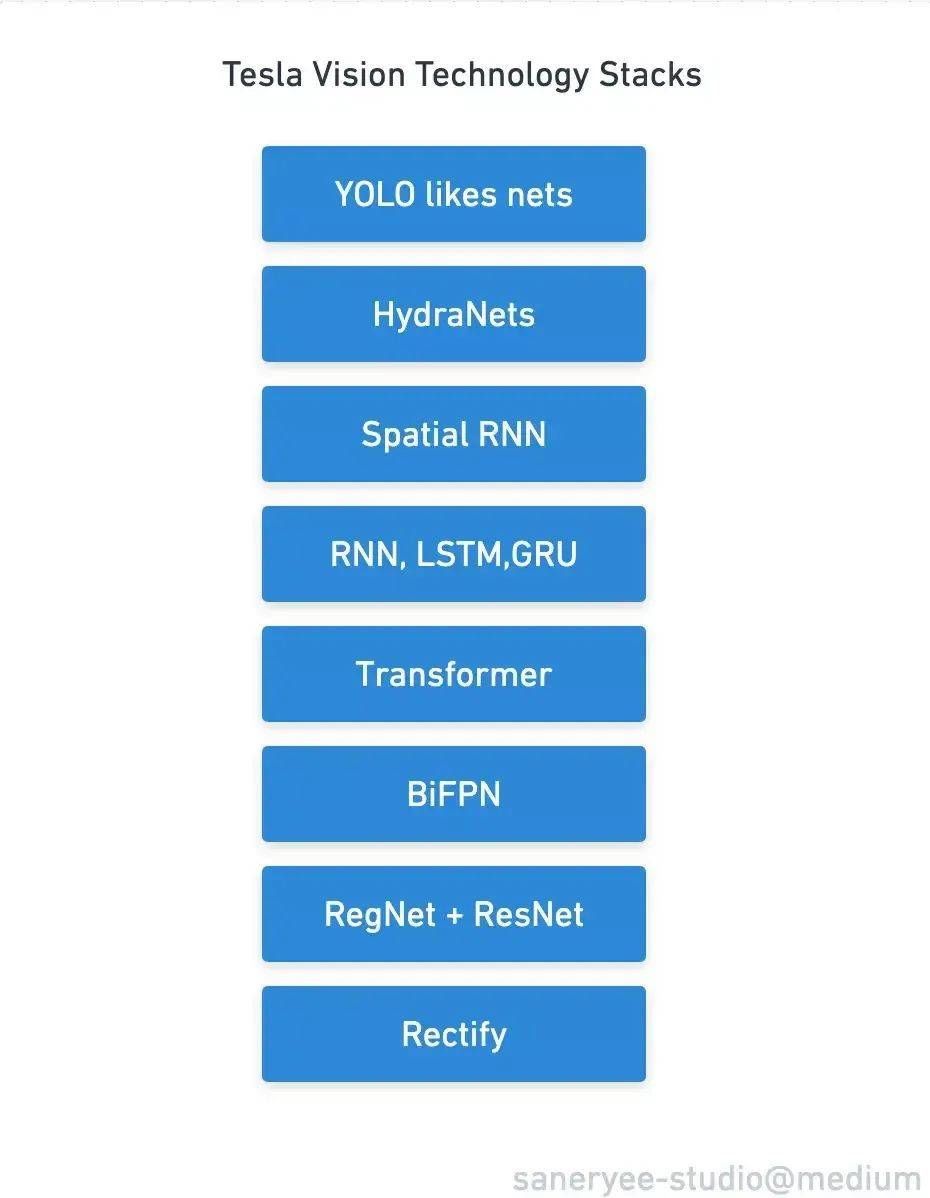
事实上,特斯拉更多值得称道的,是对各种各样已存的如RNN、LSTM、RegNet(上图)等普通模型进行创新,且把它们的潜力发挥到极致;
同时,强大的工程能力,又让特斯拉把这些模型都塞进了车里。
“特斯拉是在从大模型原理入手,去试图做一些有益于自动驾驶整个模型的设计,同时又考虑到汽车必要的轻量化和小型化,再结合自己的AI芯片(TRIP)工艺往车上搬。
我认为这是一件更趋向于实干的事情,而不是像国内一些公司吹牛蹭热点。”
从1到1.X?
不能上车,那么大模型做离线支持的“数据闭环”工作总可以吧?
“数据闭环”这个概念,可以参考被说烂了的特斯拉Autopilot数据引擎框架——
确认模型误差、数据标注和清洗、模型训练,再到重新部署。
与此同时,全球各地的特斯拉车辆源源不断的回传数据进入这套流程,使之迅速流转起来,形成一套闭环系统。
但有趣的是,没有“大模型”,这些工作也可以做,不是非大模型介入不可。
譬如,数据闭环里的“预标注”,国内无论是早期的B大厂,还是H大厂的某生物工具链,做的这套东西已经非常成熟,那么大模型的“增益”就有待评估,没有PPT们渲染的那么厉害。
实际上,数据闭环的概念既简单又复杂。
简单在于,它可以被直接看做是“锤炼算法的大型基础设施”,从它里面出来的模型上车后足够智能,足够见多识广。
而复杂之处在于,它的每个环节,几乎可以作为一个小型创业项目——
如何做到样本的自动化挖掘,如何清洗掉冗余数据留下有营养的部分,如何做好数据的冷存储与热存储?如何分门别类组织好数据?如何做到更有效的预标注……
所以,这套闭环的工程量极为庞大,每个环节都需要专门的人才维护。
而对于自动驾驶创业公司来说,由于极度烧钱,一般会选择“把A部分做好,把B部分外包出去”的轻量化模式,有强项也有短板。
目前,虽然各家东西细节无从比较,但L4独角兽P厂的数据闭环工具链“CQ”,竟然得到了业内不错的评价。
对于这只早期L4巨兽,不谈商业模式,被认为“在构建基础设施上的积累比较厚实”,是一家在技术层面有真东西的企业。
此外,维持这套东西的运转,必然需要投喂更多的新鲜血液——数据与人才。因此,不是谁都能玩得起。
而特斯拉与比亚迪,是被认为有可能把这个东西做好的商业组织。
只不过,基于人工智能的特性,数据闭环短期内是看不到成效的。它更像是春播秋收,把该浇的水、该施的肥、该播的种都做到位,不会立竿见影且巨烧资源,但效果出现后,便是马太效应形成的开始。
因此,要比大模型在数据闭环上的应用,不如比谁更有钱。
写在后
当然,以上内容无意在狙击谁,也无意表扬谁(否则不会用字母指代),而是希望产业能回到一个正常的对比参照系内,以及重点放在实际效果上。
以及,建议企业把办公室内的“牌匾”换成特斯拉的成功三要素:
坚持第一原则思考方式,工程能力,以及执行力。
本文来自微信公众号:宇多田(ID:hellomusk),作者:宇多田
以上就是【别吹了,自动驾驶大模型PPT们】的相关内容,查看其它ai资讯请关注微咔网
根据二〇〇二年一月一日《计算机软件保护条例》第十七条规定:为了学习和研究软件内含的设计思想和原理,通过安装、显示、传输或者存储软件等方式使用软件的,可以不经软件著作权人许可,不向其支付报酬。
本网站所有发布的源码、软件和资料,均为作者提供或网友推荐收集各大资源网站整理而来,仅供功能验证和学习研究使用。
所有资源的文字介绍均为网络转载,本站不保证相关内容真实可信,同时不保证所有资源100%无错可用,也不提供相应的技术支持,介意勿下。
您必须在下载后24小时内删除,不得用于非法商业用途,不得违反国家法律,一切关于该资源的商业行为与本站无关。
如果您喜欢该程序,请支持正版源码,得到更好的正版服务。、如有侵犯你的版合法权益,请邮件与我们联系处理【投诉/建议发送至邮箱:3066548754@qq.com】,本站将立即改正并删除。
本声明为本站所有资源最终声明,所有与本声明不符的表述均以本声明内容为准。
微咔网 » 别吹了,自动驾驶大模型PPT们









